Mi intención es mas tener un diario de reflexión sobre los proyectos que un tutorial en sí, ya que la mayoría de ellos serán "vilmente" copias de otros tutoriales encontrados en la red. Pero las inevitables ganas de cucharear hacen que estos proyectos evolucionen a cosas insospechadas y esas serán las que merezca la pena comentar , por si a alguien le puede servir de inspiración

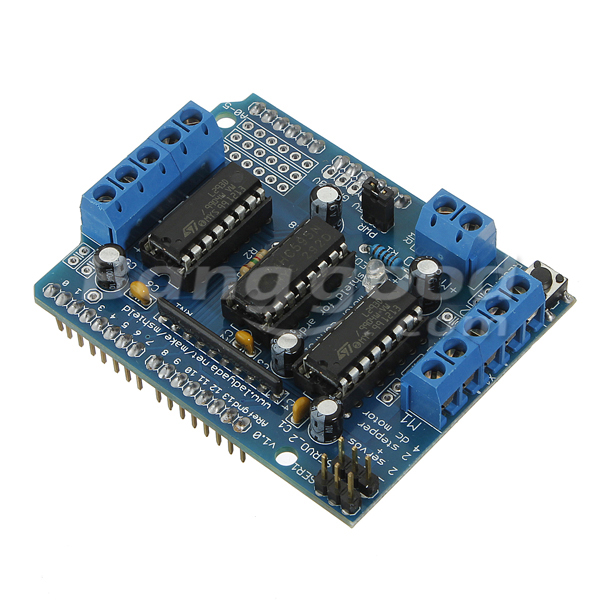
En fin os comento lo que he aprendido sobre esta plataforma (realmente barata), comprada en banggood por 9€, viene ya con los motores , pero sin pilas. Allí mismo he comprado el motor shield compatible con el de adafruit por 3 Euros y pico.

{kind=link}
En adafruit he encontrado la libreíia y ejemplos y funciona a la primera.
El tema de conexionado da un poco que pensar, porque no queda claro si afecta que Arduino y el motor compartan la alimentación. Parece que mete ruido , pero en los tutoriales que he visto suelen cerrar e se ve en la figura y alimentar Arduino directamente de la entrada de baterías.
Código que incluye la libreria , mueve la rueda hacia delante y para.
#include <AFMotor.h>
AF_DCMotor
motor(2, MOTOR12_64KHZ); // create motor #2, 64KHz pwm
void
setup() {
Serial.begin(9600); // set
up Serial library at 9600 bps
Serial.println("Motor test!")
motor.setSpeed(200); // set the speed to 200/255
}
void
loop() {
Serial.print("tick");
motor.run(FORWARD); // turn it on going forward
delay(1000);
Serial.print("tack");
motor.run(RELEASE); // stopped
delay(1000);
}
No hay comentarios:
Publicar un comentario